在工業(yè)4.0與智能制造深度融合的今天,具身智能工業(yè)機(jī)器人技術(shù)原理正以顛覆性創(chuàng)新重塑制造業(yè)底層邏輯。不同于傳統(tǒng)工業(yè)機(jī)器人依賴預(yù)設(shè)程序的剛性模式,具身智能工業(yè)機(jī)器人通過(guò)“感知-認(rèn)知-執(zhí)行”的閉環(huán)架構(gòu),實(shí)現(xiàn)自主決策與動(dòng)態(tài)適應(yīng),成為柔性生產(chǎn)的核心驅(qū)動(dòng)力。

技術(shù)原理的核心:感知、認(rèn)知與執(zhí)行的深度融合
具身智能工業(yè)機(jī)器人技術(shù)原理的核心在于其三大系統(tǒng)的高度協(xié)同:
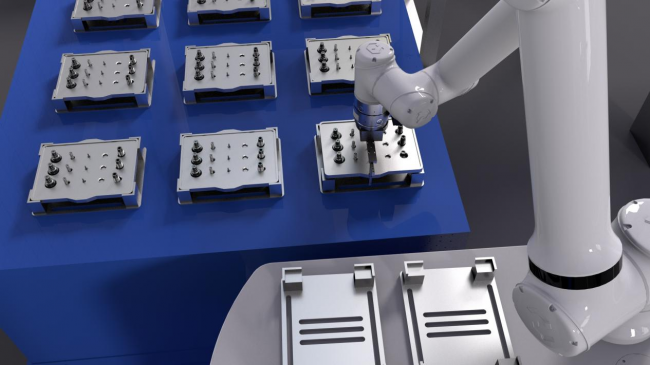
多模態(tài)感知系統(tǒng):通過(guò)激光雷達(dá)、3D視覺(jué)、力覺(jué)傳感器等,實(shí)時(shí)采集環(huán)境數(shù)據(jù),精準(zhǔn)識(shí)別物體位置、姿態(tài)及狀態(tài)。例如,微億智造的機(jī)器人通過(guò)高精度圖像傳感器追蹤動(dòng)態(tài)缺陷,誤差率低至±0.02mm,實(shí)現(xiàn)超越人類的檢測(cè)能力。
認(rèn)知決策層:基于AI大模型構(gòu)建“世界模型”,將環(huán)境信息抽象為結(jié)構(gòu)化知識(shí)庫(kù),支持自主規(guī)劃與動(dòng)態(tài)調(diào)整。通過(guò)“示教-學(xué)習(xí)-反饋”模式,機(jī)器人可快速適配新任務(wù),如半導(dǎo)體封裝中僅需少量示教即可完成晶圓抓取,良率提升至99.8%45。
閉環(huán)執(zhí)行系統(tǒng):融合運(yùn)動(dòng)控制算法與實(shí)時(shí)反饋機(jī)制,確保動(dòng)作精準(zhǔn)高效。例如,多軸實(shí)時(shí)控制系統(tǒng)以毫秒級(jí)響應(yīng)速度優(yōu)化運(yùn)動(dòng)軌跡,在汽車焊接場(chǎng)景中實(shí)現(xiàn)±0.1mm重復(fù)定位精度。
場(chǎng)景落地:從理論到工業(yè)實(shí)踐的跨越
具身智能工業(yè)機(jī)器人技術(shù)原理的先進(jìn)性在多個(gè)領(lǐng)域得到驗(yàn)證:
半導(dǎo)體制造:通過(guò)多模態(tài)感知與自適應(yīng)抓取,機(jī)器人可處理5000片/日晶圓,人工干預(yù)率降低90%;
汽車裝配:在新能源電池極片涂布檢測(cè)中,動(dòng)態(tài)調(diào)整涂布厚度誤差至±1µm,顯著提升產(chǎn)品一致性;
復(fù)雜物流:AGV與機(jī)械臂協(xié)同作業(yè),實(shí)現(xiàn)跨車間物料轉(zhuǎn)運(yùn),效率提升40%,人力成本削減60%。
技術(shù)優(yōu)勢(shì):柔性、效率與安全的革命性提升
具身智能工業(yè)機(jī)器人技術(shù)原理的突破性在于其“智能與軀體深度耦合”的設(shè)計(jì)理念:
柔性適配:模塊化架構(gòu)支持快速換線與多任務(wù)切換,兼容小批量、多品種生產(chǎn)需求;
動(dòng)態(tài)學(xué)習(xí):通過(guò)實(shí)時(shí)交互數(shù)據(jù)優(yōu)化算法,適應(yīng)環(huán)境不確定性,如無(wú)塵車間中的藥品分裝誤差趨近于零;
人機(jī)協(xié)作:3D避障與力控技術(shù)保障人機(jī)混流安全,突破傳統(tǒng)隔離作業(yè)限制57。
未來(lái)展望:從工具到智能生態(tài)的進(jìn)化
隨著數(shù)字孿生與5G技術(shù)的融合,具身智能工業(yè)機(jī)器人技術(shù)原理將推動(dòng)機(jī)器人從“單機(jī)執(zhí)行”向“云端協(xié)同”升級(jí)。未來(lái),通過(guò)低代碼編程與虛擬調(diào)試,企業(yè)可快速部署智能產(chǎn)線,調(diào)試周期從7天壓縮至2小時(shí),真正實(shí)現(xiàn)“即插即用”的智造生態(tài)。
|麥克瑪視將")


:以精準(zhǔn)標(biāo)")